 Peking University, Jan 27, 2025
Peking University, Jan 27, 2025: How can some fish, like tuna, achieve remarkable speed while others, like eels, excel in maneuverability? A research team from Peking University (PKU) has developed a novel robotic platform that sheds new light on this classic biomechanical puzzle. Led by Professor Yu Junzhi from the School of Advanced Manufacturing and Robotics, the team created a soft robotic fish capable of switching between eel-like (anguilliform) and tuna-like (carangiform) swimming modes. This reconfigurable system allowed them to directly test how body stiffness and wave propagation affect swimming performance, factors difficult to measure in living fish. Their findings were published in
Science Advances.
Background
Fish use body waves to swim, but the portion of the body involved in undulation varies across species. Anguilliform fish undulate most of their bodies, enabling high maneuverability but limiting speed, whereas tuna-like swimmers concentrate motion near the tail to achieve fast, efficient cruising. Directly testing how stiffness and wave propagation govern these differences has been difficult in live animals and prior robotic models. To address this challenge, the PKU team developed a reconfigurable, modular soft robotic fish with controllable body stiffness.
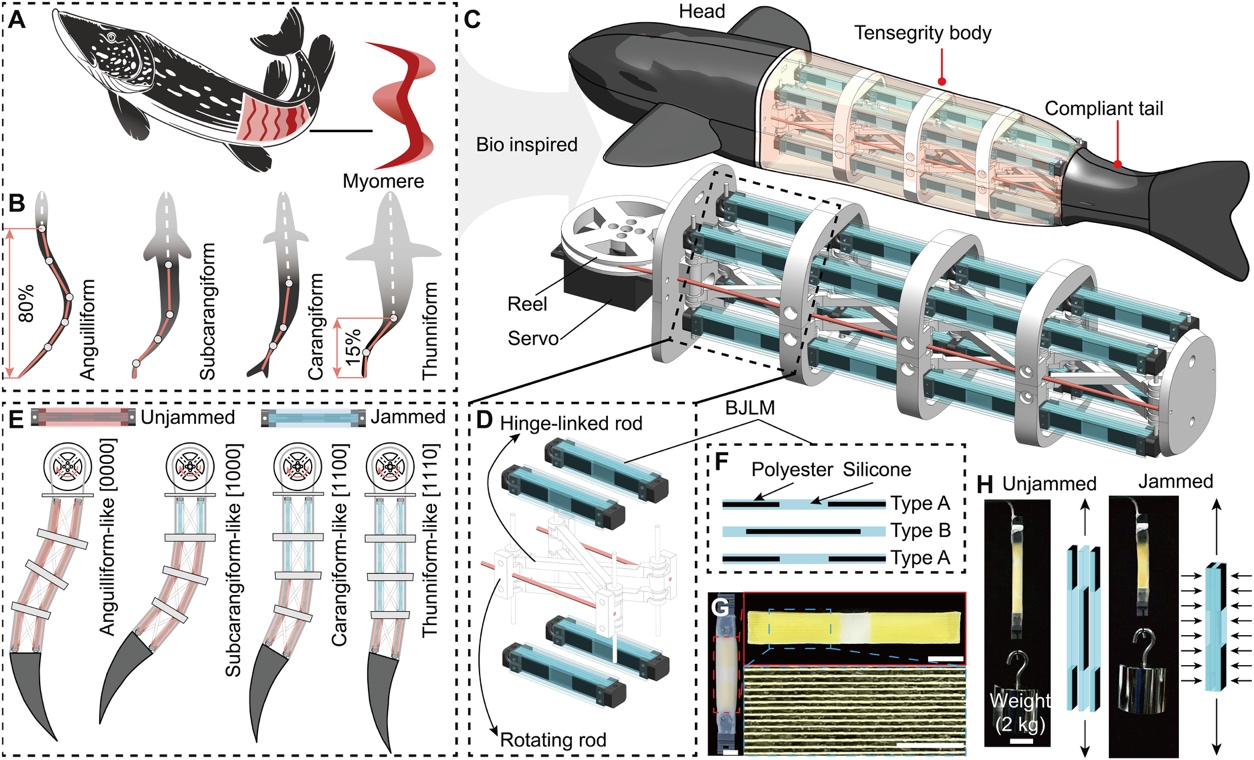
Fig. 1. Design of the multimodal soft robotic fish.
Why it matters
Understanding how fish balance speed, efficiency, and agility is a fundamental challenge in biomechanics and bio-inspired robotics. This study provides the first unified experimental platform for directly comparing different swimming gaits under controlled conditions. Beyond advancing basic science, the findings offer practical design principles for underwater robots that must operate in complex environments, including cluttered waterways, narrow passages, and open water.
Key Findings
The robotic fish achieved a maximum swimming speed of 1.24 body lengths per second at 5 Hz in the tuna-like mode, while the anguilliform mode showed a sharp decline above 4 Hz due to insufficient stiffness and reduced tail amplitude. Swimming speed was governed by tail-beat amplitude and body-wave propagation speed, both dependent on stiffness distribution along the body. In the high-stiffness tuna-like mode, efficient wave transmission with wavelengths of 0.75–1.05 body lengths was maintained at high frequencies, enabling greater thrust. Computational fluid dynamics simulations showed that this mode generated strong, coherent vortex rings at the tail, whereas the anguilliform mode produced fragmented wakes and higher drag near the head. At 5 Hz, thrust in the tuna-like mode was 142% higher, while the anguilliform mode achieved superior maneuverability with a minimum turning radius of 0.26 body lengths.
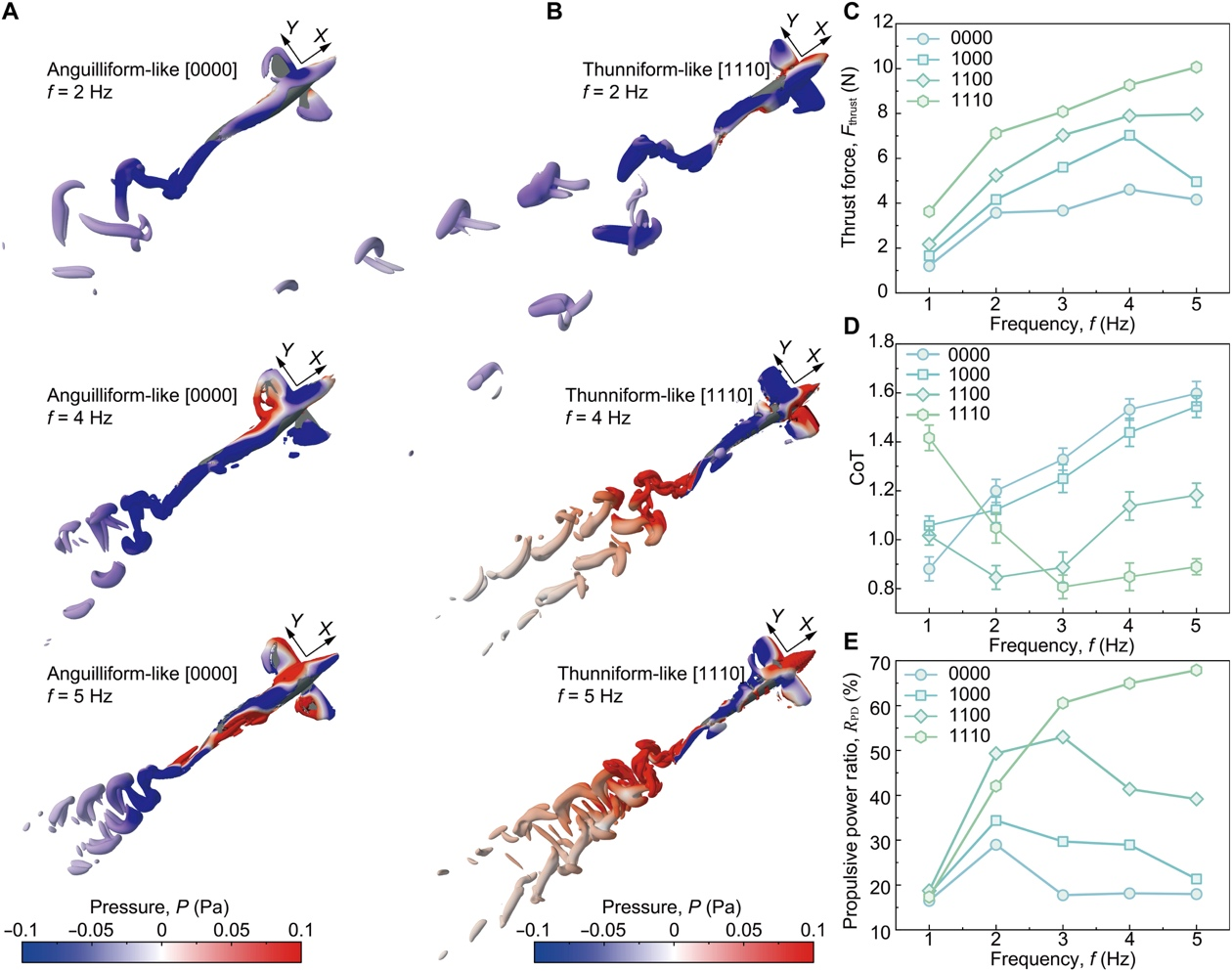
Fig. 2. Hydrodynamic analysis of the multimodal robotic fish.
Future Implications
By dynamically switching between swimming modes, the robotic fish overcame the traditional trade-off between speed and maneuverability. Tests in narrow channels and outdoor environments showed that the multimodal strategy outperformed single-mode robots, highlighting potential applications in ecological monitoring, underwater exploration, and emergency rescue.
*This article is featured in PKU News "Why It Matters" series. More from this series.
Read more: https://www.science.org/doi/10.1126/sciadv.aea1299
Written by: Akaash Babar
Edited by: Chen Shizhuo
Source: PKU News (
Chinese)









